產品中心
現有技術方案
目前(qian)接受(shou)度(du)最(zui)廣的解(jie)決方案是加裝(zhuang)信(xin)號(hao)燈(deng),自動導(dao)引車(che)(che)輛到(dao)(dao)達(da)十字路口后,發送信(xin)號(hao)給(gei)調度(du)系統,由(you)系統控制信(xin)號(hao)燈(deng)亮紅燈(deng),從(cong)而警(jing)示人工(gong)駕(jia)駛設備,到(dao)(dao)達(da)人讓車(che)(che)的目的。
現有技術,主(zhu)要是(shi)以(yi)預防為(wei)(wei)主(zhu),而(er)且是(shi)以(yi)人(ren)讓(rang)(rang)車為(wei)(wei)主(zhu),這(zhe)個思路本(ben)身就存在較大風險(xian),因為(wei)(wei)收到視線,盲區,地面(mian),阻擋等多方(fang)(fang)因素影(ying)響,人(ren)員在觀察后信號燈后,往往已經存在碰撞體積,同時,人(ren)員的疏忽(hu),產品放置的不規范等,也都會(hui)給雙方(fang)(fang)的安全避讓(rang)(rang)造成一定影(ying)響。
本(ben)設(she)計主要針(zhen)對(dui),傳統設(she)備(bei)有或(huo)者沒有改造(zao)的(de)基礎條件,都可以(yi)快速(su)便捷得批量復(fu)制(zhi)(zhi),且改造(zao)成本(ben)低,在預防(fang)的(de)同(tong)時,可以(yi)快速(su)制(zhi)(zhi)動主從方運載(zai)車(che)輛,防(fang)止危險的(de)發生(sheng)。
本系(xi)統公開了(le)一(yi)種針(zhen)對不同環境(jing),不同控制方法(fa)內的車輛(liang)進行可靠的緊(jin)急制動系(xi)統。
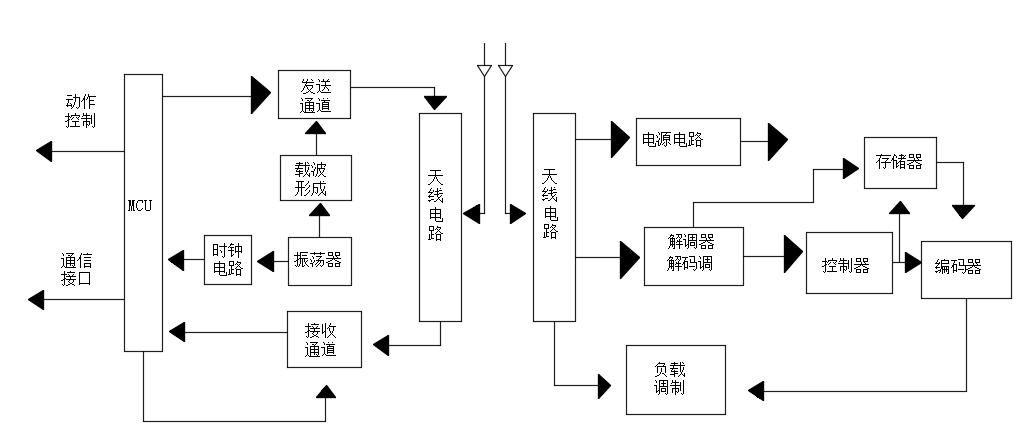
由UHF讀頭,UHF標簽(qian),控制(zhi)器組成。
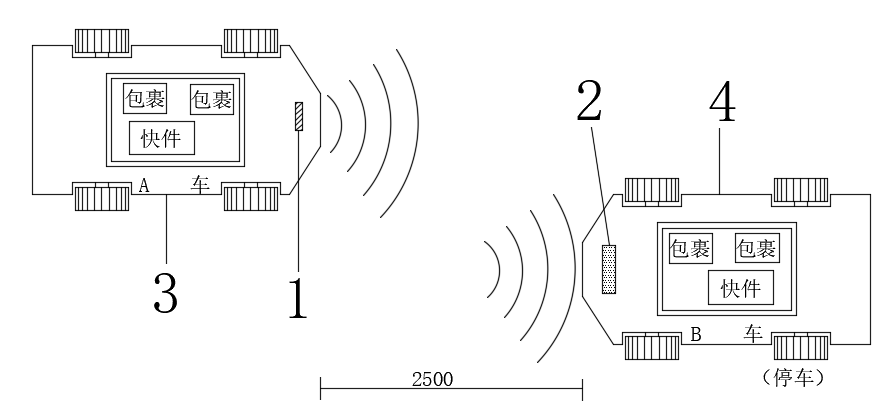
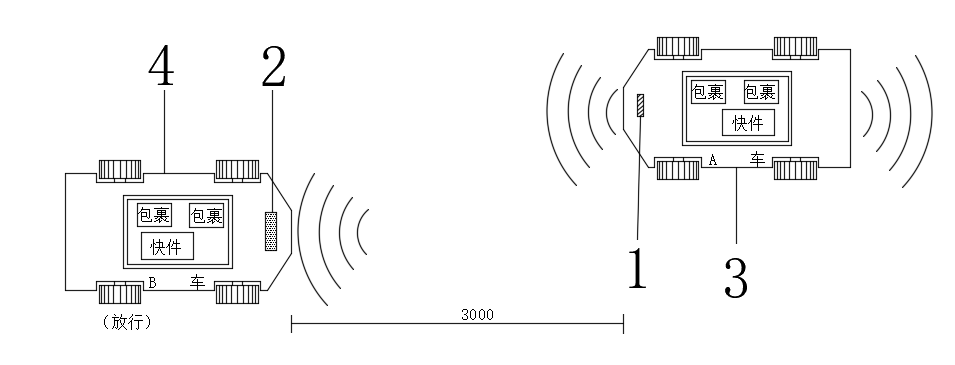
在(zai)A車(che)(che)輛(liang)上放置(zhi)UHF標簽卡,然(ran)后在(zai)B車(che)(che)輛(liang)上安裝UHF讀(du)頭,通(tong)過調整天線(xian)功率,從而將接受(shou)有(you)效范(fan)(fan)圍(wei)直(zhi)徑(jing)控(kong)(kong)制在(zai)2~2.5米內,當在(zai)感(gan)應距離(li)內發現(xian)貼有(you)標簽卡的(de)A車(che)(che)時,根據讀(du)頭反饋回來的(de)數據,進行(xing)分析和邏輯控(kong)(kong)制,完(wan)成B車(che)(che)的(de)暫(zan)時停車(che)(che),等到A車(che)(che)離(li)開有(you)效范(fan)(fan)圍(wei)之后,B車(che)(che)解鎖,繼續行(xing)駛。
根據運送邏輯(ji)來看,哪一輛的(de)(de)優先級高,則(ze)(ze)為A車,優先級低的(de)(de)則(ze)(ze)為B車,B讓(rang)A,這樣邏輯(ji)和運送頻次都(dou)可以得到保障。